Introduction to RoboGen
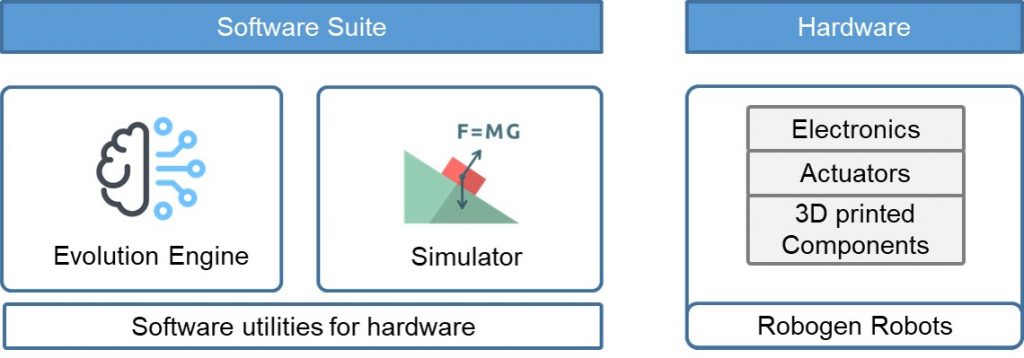
RoboGen™ is an open source platform for the co-evolution of robot bodies and brains. It has been designed with a primary focus on evolving robots that can be easily manufactured via 3D-printing and the use of a small set of low-cost, off-the-shelf electronic components. The Robogen Software Suite features an evolution engine and a physics simulation engine. Additionally, it includes utilities for generating design files of body components, and for compiling neural-network controllers. The Robogen hardware consists of an Arduino microcontroller board, 3D printed modular parts and servo-motors.
RoboGen Software Suite
The Robogen software is designed to perform artificial evolution for the Robogen project. The evolution engine is responsible for the most of the conceptual part of the evolution process (e.g. population generation, selection, mutation, and reproduction), while the simulator is only there to do the fitness evaluation. The two components work together to perform the artificial evolution of Robogen robots. They are executed as two independent processes that communicate over the network.
More information on Robogen Software Suite is available here.
Hardware
Once you have a robot that behaves the way you would like in the simulator, it is time to build it. For this you will need some electronic components, a set of standard 3D printed parts, and a set of custom parametrized parts that you will need to 3D print. More details on how to get a hold of these parts are available at 3D print and assembly guide